由开放原子开源基金会发起的开放原子开源大赛持续火热报名中!大赛旨在联合开源组织、企事业单位、高等院校、科研院所、行业组织、投融资机构等多方资源,充分发挥产业链生态上下游的协同能力,基于开源共享、共建共治的原则共同举办。
现同元软控应“开放原子开源基金会”邀请,参与“开放原子开源大赛”的新兴及应用赛道,特设“无人智能开发大赛”,大赛瞄准无人机智能应用发展趋势,释放智能算法演进势能,以赛为媒,为智能无人系统的集智研发、创新实践、成果转化搭建起广阔平台。现大赛已正式开放报名,诚邀所有热爱无人机的开发者们前来挑战,可以团队或个人形式参赛。本次比赛奖金总额高达40万元!所有获奖团队或个人将直接从基金会获得奖金。
参赛作品要求
1、场景设定
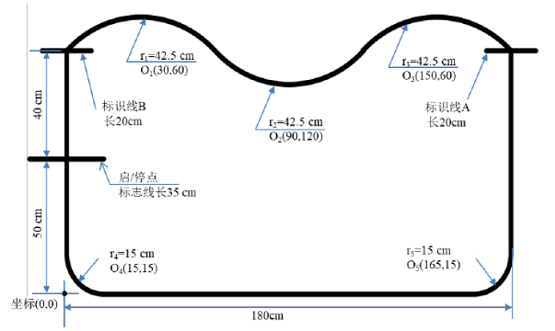
图1场景示意图(仅供比例参考,实际大小以赛事场地为准)
创建一个包含信号灯和轨迹的室内环境。初赛在虚拟仿真环境中进行无负载飞行;决赛使用实机进行比赛,需给无人机挂载赛事方指定的重物,无人机通过绳索跟重物相连,并重复初赛的任务。
初赛时,参赛队员根据赛题提交设计方案、模型、仿真报告并由专家进行评分。初赛评审通过的参赛队,将获得决赛入场券。实机决赛的评审按实机测试、作品宣讲、决赛评分顺序进行。共8支队伍入围决赛参与角逐最终名次,决赛由赛题共建方(同元软控)提供无人机(无人机型号为:阿木实验室MFP450型号无人机,搭配UWB套件+FMT飞控+树莓派机载电脑),比赛结束时会由赛题共建方收回无人机。若发生炸机等情况,选手可以现场购买无人机(¥5000,现场购买的无人机所属权归选手所有)继续比赛或主动放弃比赛。
2、任务设定
(1)起飞和降落:参赛者需要编写飞行控制算法,确保无人机能够安全起飞和降落。算法应考虑起飞和降落区域的限制条件,如飞行高度限制等。
(2)自主导航:无人机需要能够自主导航到指定目标点。参赛者可以借助视觉、UWB、惯性导航等传感器进行导航,但需要考虑传感器误差和不确定性。
(3)目标检测与识别:参赛者需要编写目标检测与跟踪算法,使无人机能够识别场景中的红绿信号灯。算法应具有一定的鲁棒性,能够应对目标运动、遮挡等情况。
3、任务完成评估
无人机需自主完成在启/停点的起飞和降落,并按照预定轨迹飞行5圈。在赛道中间将设置若干红绿信号灯,无人机需对信号灯进行识别,当红灯亮起,无人机需停止等待,绿灯方可通行。最终根据总耗时时间以及偏离预定轨道的程度计算最终的分数。
了解更多赛事信息,请关注同元软控“MoHub”微信公众号。
报名入口





